Locomotion of Inverted Pendulum Robot
Project Report | Video of Robot in Action
Overview
For my Engineering Systems Analysis class, my project partner and I adapted a basic control algorithm for balancing an inverted pendulum to enable remote-control driving.
Process
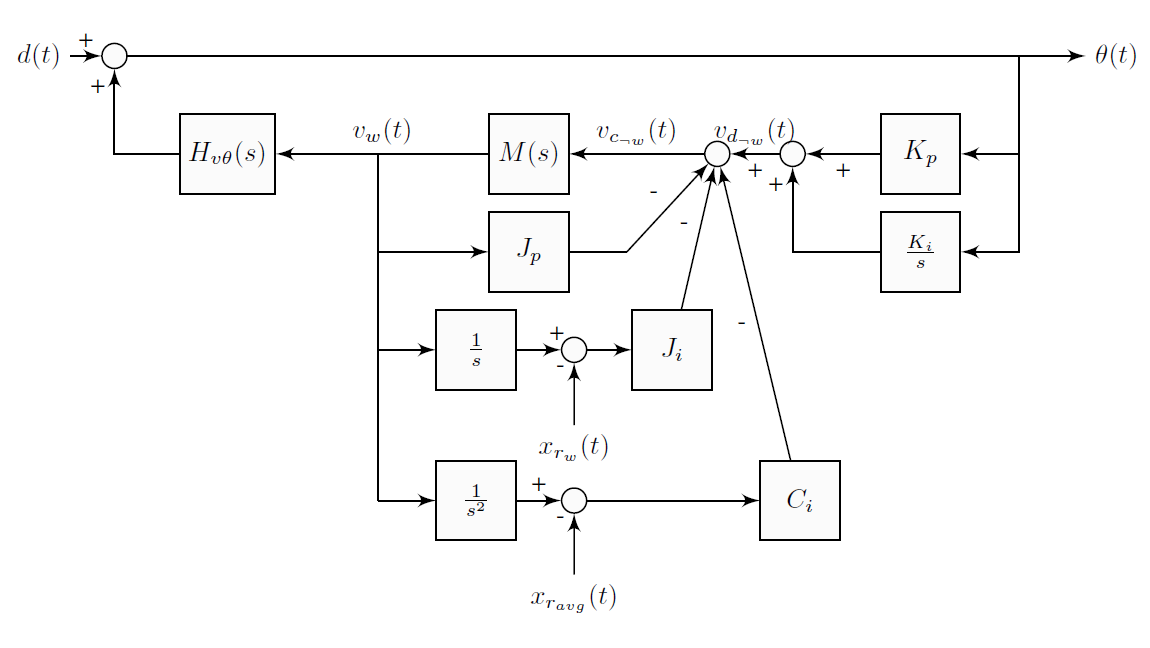
In this project, my contributions spanned the tuning of the control algorithm, calibrating parameters intrinsic to the physical robot, and designing modifications to the control algorithm to enable stable and drift-less balancing and locomotion. Though this, I was able to develop my theoretical knowledge in Laplace transforms, transfer functions, and linear time-invariant systems.
My process involved performing tests with the robot, collecting empirical and quantitative data on the performance of the robot, and adjusting control parameters using analysis scripts in MATLAB. I also helped design the integration of the remote control’s inputs into the control system so that the robot could be driven with the ease of a RC car.
The control algorithm for the robot is described in the project Report.